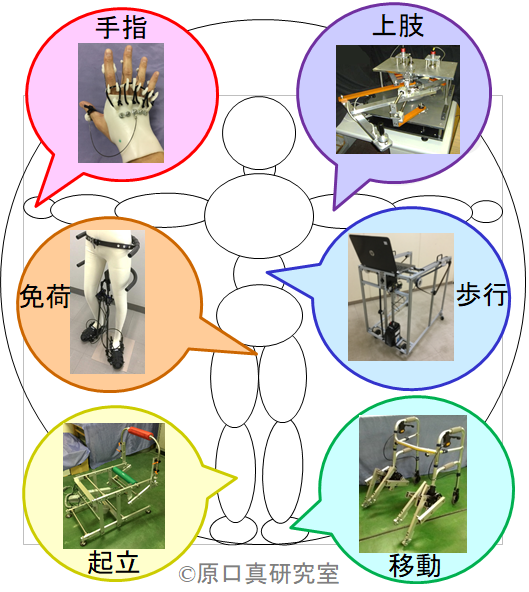
2015年度に開発した段差乗り越え機構(0次試作機)を元に,階段を昇降可能な装置(1次試作機)を研究室にて開発中です.


階段昇降装置としてはクローラ(※いわゆるキャタピラの事)が主流ですが,それとは異なり,本研究ではロボット脚を採用しています.ロボット脚は通常ですと大型高額になり,福祉機器として普及させることは難しいですが,モータを極力少なくした機構とすることでコストを低減させます.今回の機構は車椅子に取り付けることを想定しています.
クローラはモータの数も少なくシンプルな構造でよいのですが,スペースや床へのダメージなどの問題から,日本の日常生活空間には馴染まないのではないかと思われます.またクローラは踏面(※階段の水平面)を活用しないため,滑落の危険性もあります.それに対して,ロボット脚型の本開発装置は踏面を活用するため,滑落の心配はありません.開発装置の設計コンセプトとして,数段の階段を乗り越えることのみを想定していて,フロア同士の階段を移動することは考えていません(利便性と転落した時のリスクを天秤にかけた結果の設計仕様).
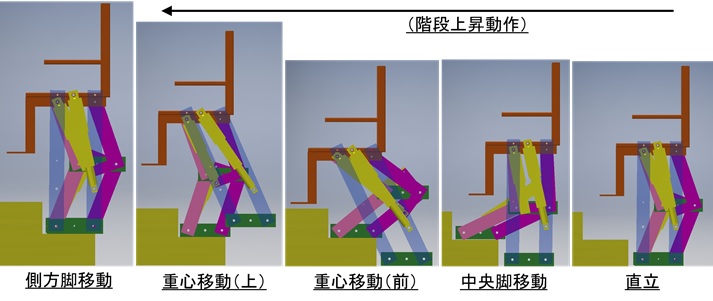
↓階段昇降機構の動きを説明した動画です.
※関連論文
・原口 真,山崎 智嗣,「リンク型段差乗越え機構を有した歩行器の開発」,第33回 日本ロボット学会学術講演会(RSJ2015).
・原口 真,田渕 大晴,与那覇 凌,「リンク式階段昇降機器の開発」,ロボティクス・メカトロニクス 講演会 2022(ROBOMECH2022).
※開発の歴史
・2015年度に段差乗り越え機構(0次試作機)を製作.
・現在,階段昇降機構(1次試作機)を開発中.